Hall sensor actuation
Decision criteria for choosing the right magnet
|
switch type desired switching characteristic switching distance way of movement dimensions, tolerances, weight |
temperature range surrounding materials mounting options existing space, etc. |
We will gladly help you to choose the right magnet
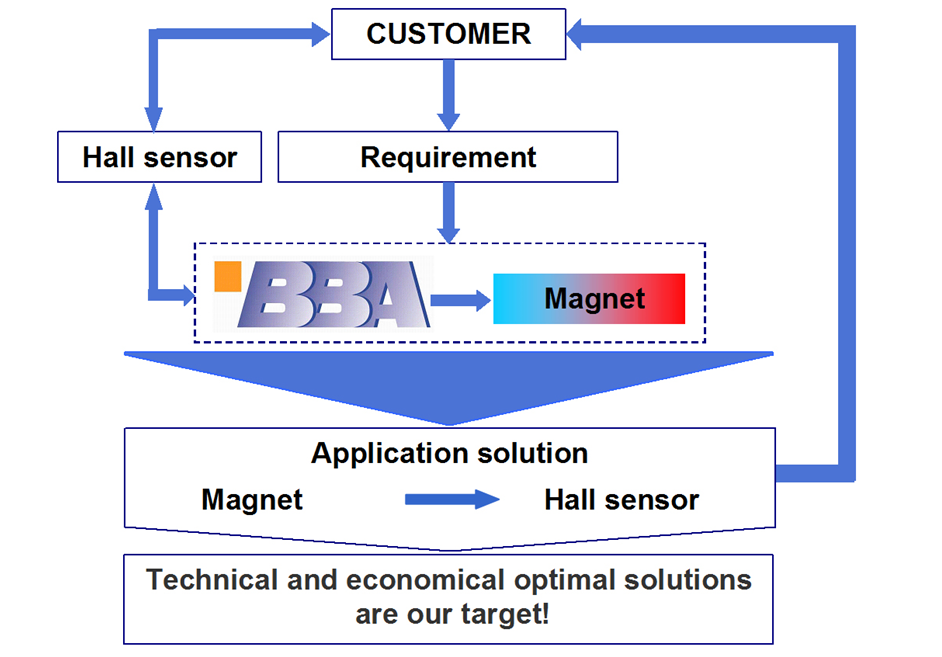
Principle of operation
The position sensors are Hall effect sensors. With the help of a permanent magnet, depending on the magnetic flux density, a switching or analog output signal can be generated. Due to the compact design, positions, speeds, states, etc. ... can be detected and evaluated without contact.
The magnetically actuated semiconductor sensors can basically be divided into three different versions:
- Digital
- Analog
- With built-in magnet
To actuate the sensors, we offer several rod and ring magnets.
Bar magnets of various sizes and strength are particularly suitable for sensors with unipolar switching characteristics.
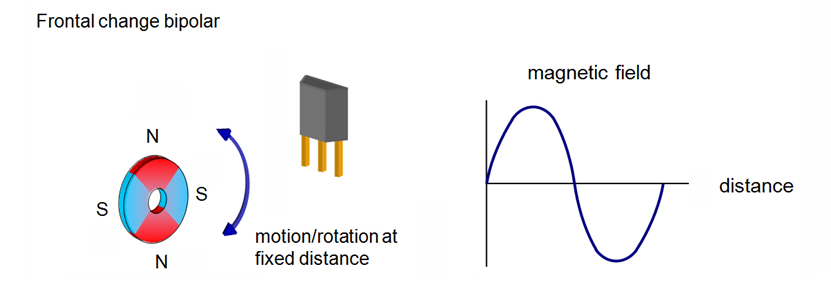
Ring magnets with alternating north and south poles on the circumference are particularly suitable for sensors with bipolar switching behavior.
In Hall effect sensors, the semiconductor chip is supplied with a current I and allows a magnetic field (B) to act perpendicular thereto. This creates a voltage in the chip at right angles to the field and the current. These sensors work pole-dependent.

As mentioned above, there are various criteria to take into consideration for choosing the right magnet. There are many variations are possible.
Performance comparison
The following table shows you the importance of choosing the right material.
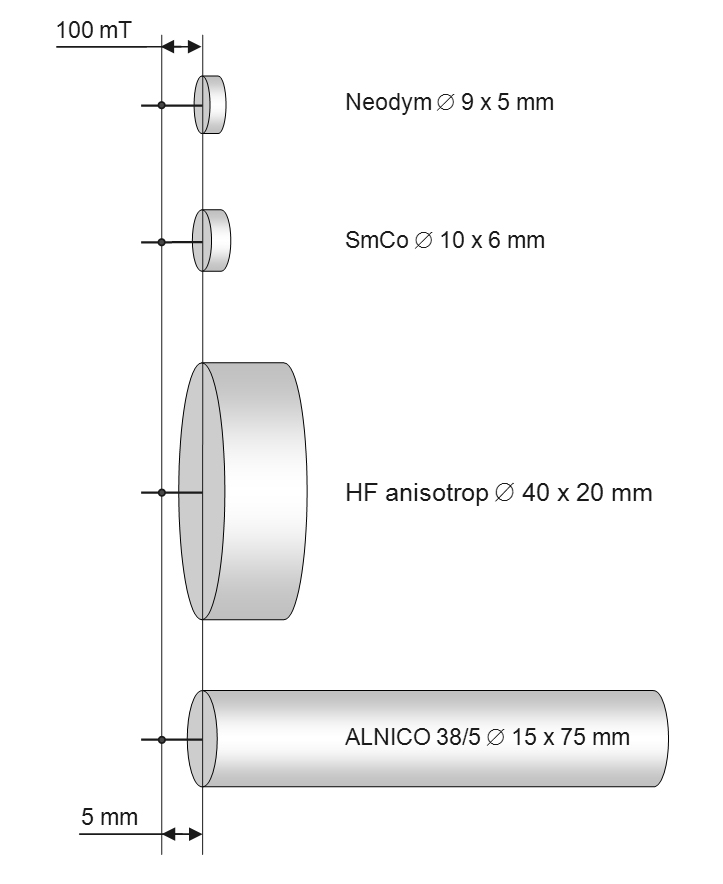 The magnets are designed to produce a field of 100 mT at a distance of 5 mm from the pole face.
The magnets are designed to produce a field of 100 mT at a distance of 5 mm from the pole face.
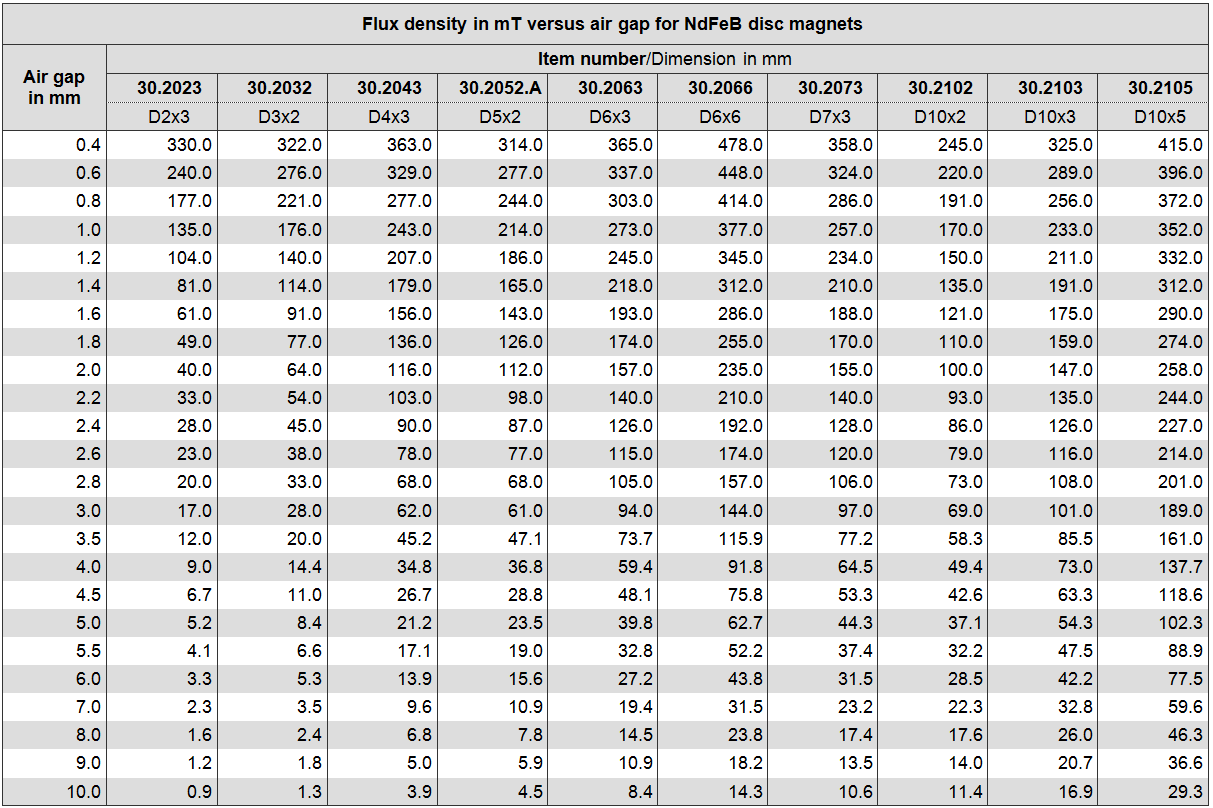
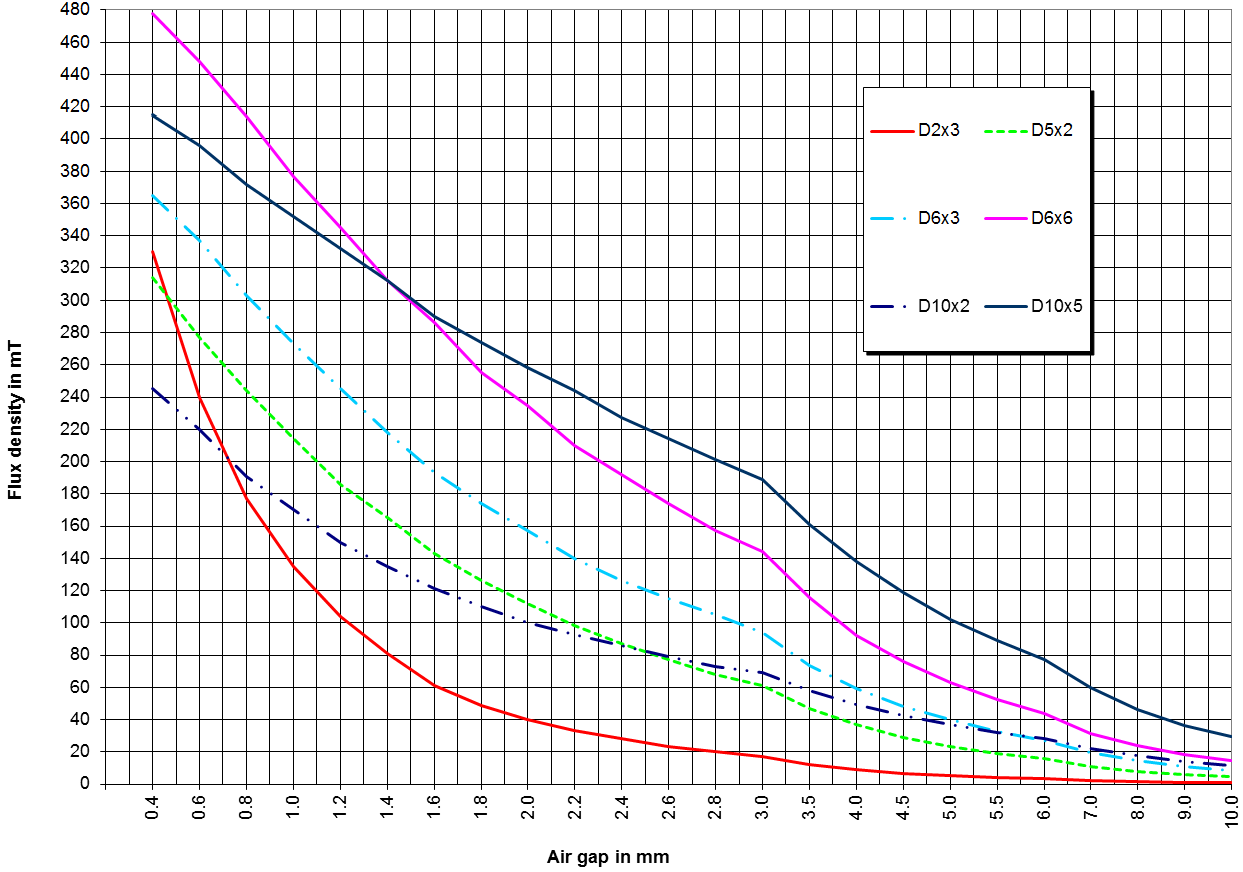
See also the following tables with the data of the flux density of neodymium magnets depending on the air gap.
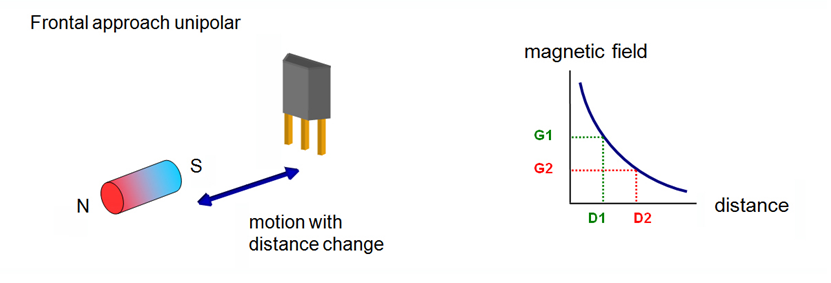
Digital sensors
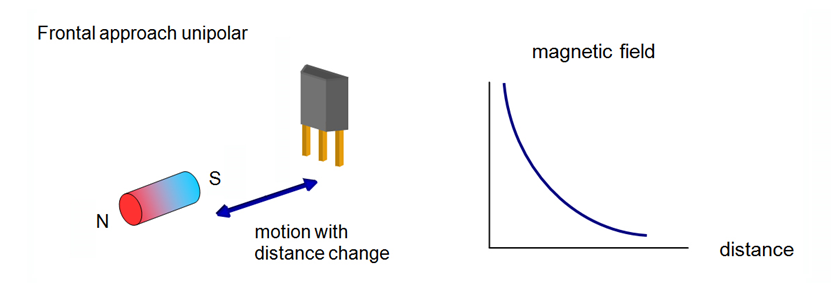
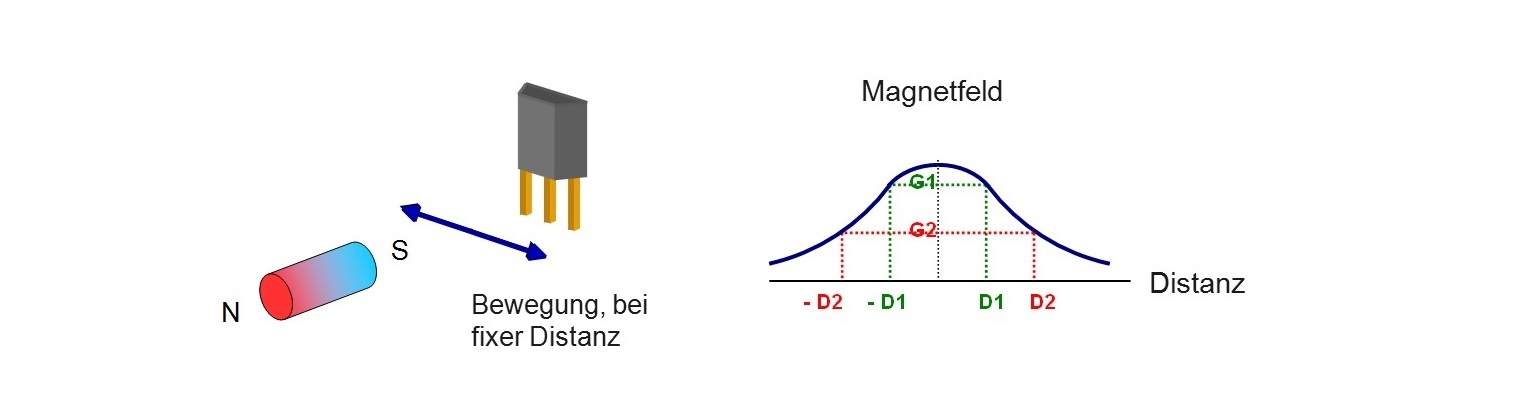
If the magnet is guided to the sensor during the frontal approach, it will only switch on at the distance D1. The magnet strength G1 is needed. If he moves away again, he switches off only at the distance D2. So a lower magnet strength is needed to "hold" the sensor.
Unipolar or bipolar magnets can be used.
Some application examples:
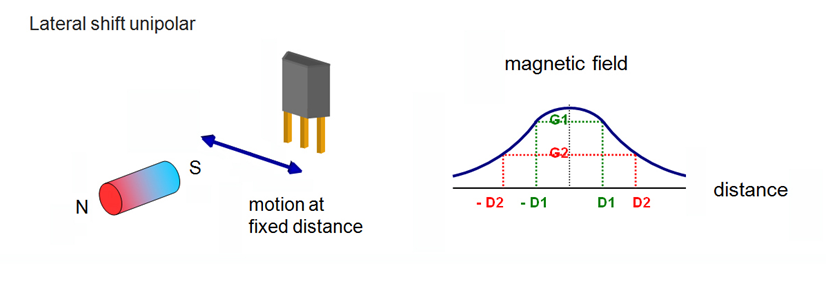
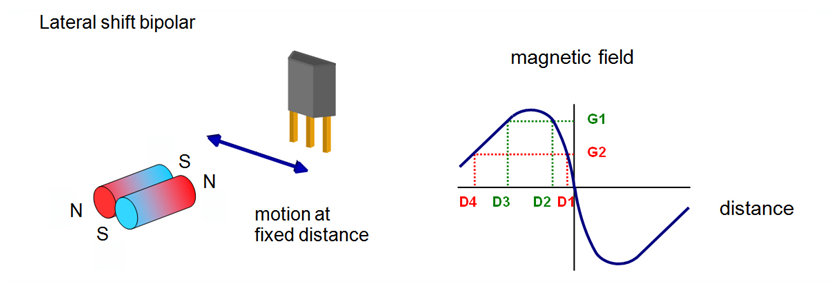
Analog sensors (distance measurement)
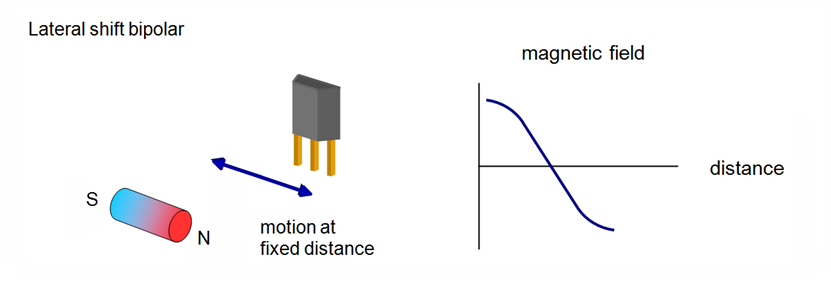
The first illustrated arrangement is the lateral approach. Between magnet and sensor a close, fixed distance is maintained. If the bar magnet is moved back and forth at a fixed distance, the sensor experiences a negative magnetic field when approaching the north pole and a positive one when the south pole is approaching. This approach is easy to set up and allows, with the use of a correspondingly long magnet, the position detection over long distances. The output characteristic curve of this distance measurement arrangement is the most linear of all the arrangements shown, especially if a pole piece is attached to both magnet ends. However, the favorable characteristic curve requires strict adherence to the air gap between the sensor and the magnet.
Some application examples: